Prosthetic Hand
- Objective: The objective of this project is to create an easily-available, customizable, 3-Dimensional (3D) printable elbow-operated prosthetic hand.
This Project is part of my University final project which was to make 3d printed, easy to customize prosthetic hand. Our focus was on the fabricating of low-cost prosthetic hand which can be affordable to handicapped people and easy to operate. Our first aim was to build the 3d printed prosthetic mechanical operated hand which can able to grab things such as water bottles, Mobile, and tools used in his day to day life.
Design criteria
- 3D printed - Most of the Design parts can be 3D printed
- Parametric Design - Design should be Equation or empirical relations Driven
- Modular Design - design can be made in small modules
Design goals
Staying between the criteria, I set some goals for the Design.
- The design should follow Fibonacci sequence relations as a human has follows
- Design dimensions can be changed according to users requirements without breaking its designed shape or constraints
- Design can be made into small modular components which can be 3d printed rapidly if some failure occurs
2 sections of Project
- The first section of the project includes work related to the University final project
- The second section of the project includes personal work related to finger design in specific
First section
concept design
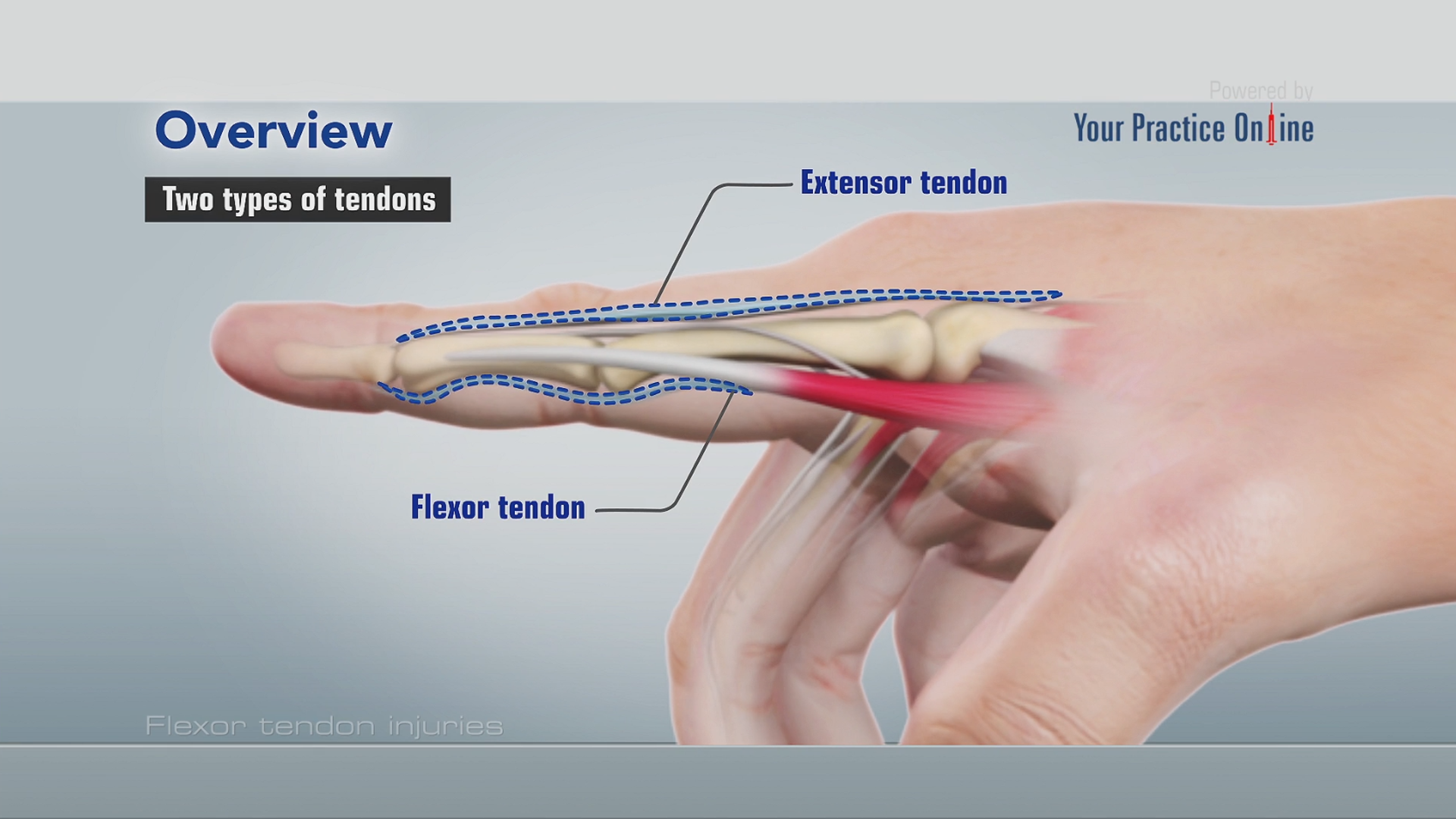
I started making concept design. at first, I thought of the extensor tendon and Flexor tendon mechanism as we
humans have.
Tendons are the soft tissue that connects our muscles to the bone allowing them to be a pully and subsequently produce movement. Tendons differ from muscles because they are mainly made up of collagen and elastin; this means they cannot
contract themselves, but they are incredibly strong and stiff. They also have a much smaller blood supply, reducing their metabolism.
Their stiffness means tendons have a remarkable ability to store and release energy like a spring. So much that the Achilles tendon can be responsible for 55-60% of your force production when running!
Front View

Back View

my Extensor and Flexor :)
I chose 0.3 mm copper wires as Extensor tendon which will move fingers by servo and elastic rubber bands as flexor tendon. I made some small slots in finger modules to place a rubber. Initially, I thought this will save my time to make extra holes for elastic bands and the design will be simpler. But, the idea of a rubber band was not physically possible in this design. so, I made some modifications in designs, and instead of a rubber band, I used elastic strings which will do the same theoretically.
Parametric finger design
Fibonacci Sequence
The Fibonacci sequence is named after Leonardo Fibonacci, an Italian mathematician who wrote about the pattern in his journals as he observed how
rabbits reproduce.
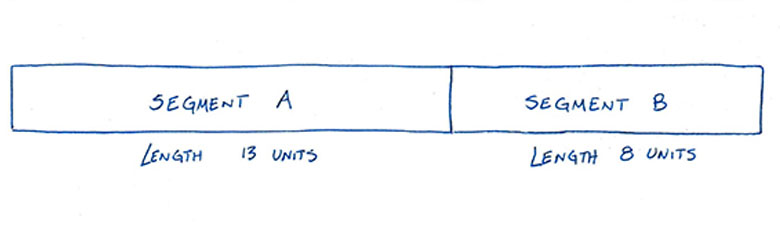
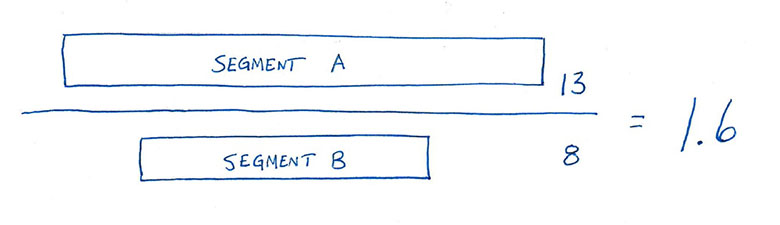
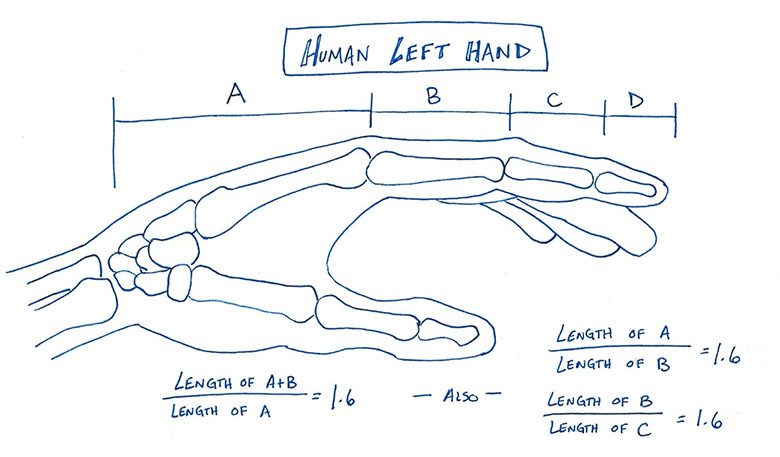
The Fibonacci sequence works like this. Let’s say you have two segments of a specific length, A and B, where A is bigger than B. If these two segments are in a Fibonacci sequence, the bigger piece divided by the smaller piece
will be
approximately 1.618.
golden ration
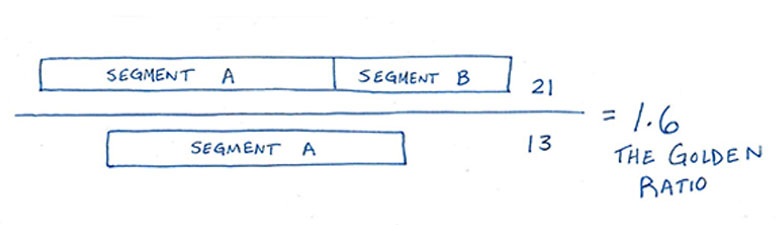
Also, if you make A’s length and add it to B’s length, then divide by A’s length, you will get the same number: 1.618. This ratio is called the golden ratio.
For example, the following numbers are a Fibonacci sequence: 3, 5, 8,13, 21, 34, 55, etc. When we divide 5 by 3, we get about 1.6. Divide 8 by 5 you also get about 1.6. 13 divided by 8? About 1.6 again!
The ratio of the bigger number divided by the smaller number, which always equals 1.6, is denoted by the Greek letter Phi (Φ) and is called the Golden Ratio. You can find Phi in the above Fibonacci example: 13 / 8 = 1.615.
Fibonacci sequence in Human hand
Look at your hand. Each of your fingers has three bones in it called phalanges (phalanx for singular). When you measure the length of the phalanges in order from the wrist to the tip of each finger, you will find that the sequence of lengths is pretty close to a Fibonacci sequence.
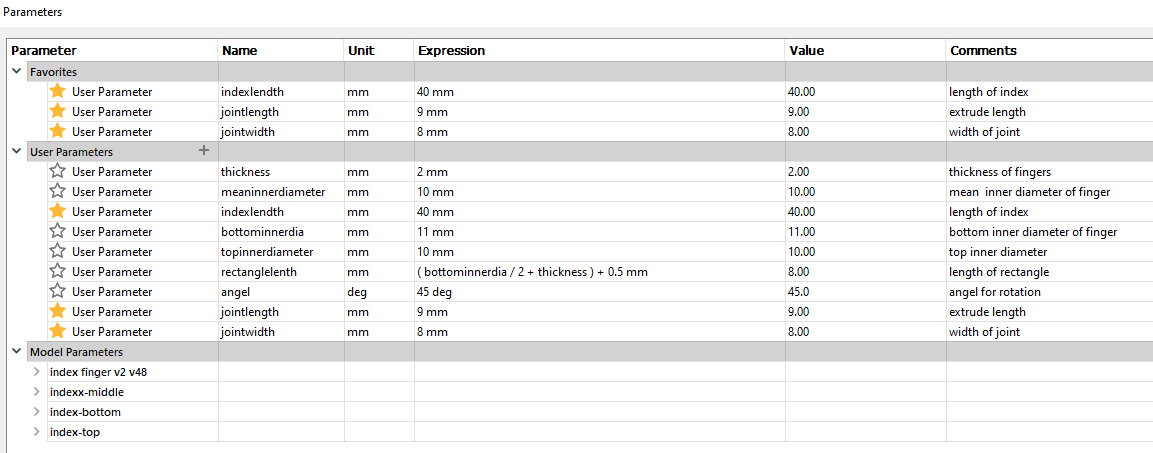
Parametric relations of Finger
Now I know the mathematical relations between different phalanx in fingers. I can make a proper finger that can grip the object naturally without any complex design implementation.

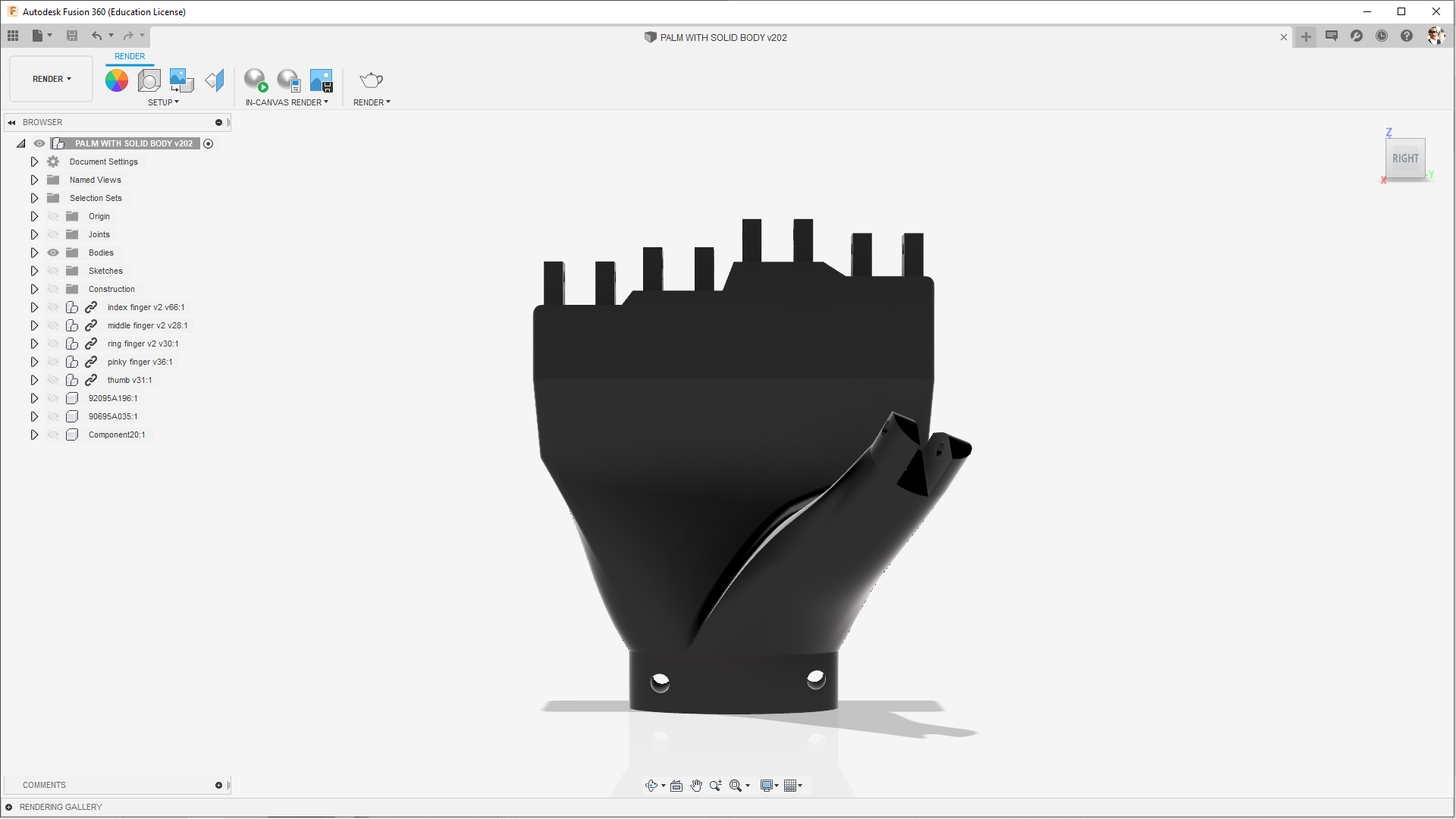
Palm design
Palm design was much harder to make because I was not able to define proper thumb position which is an important part of the design.
In the human hand, our thumb has two degrees of freedom and it can change its position according to the size and length of the object. This level of complexity was hard to achieve for me at this level so I gave a fixed
position for the thumb.
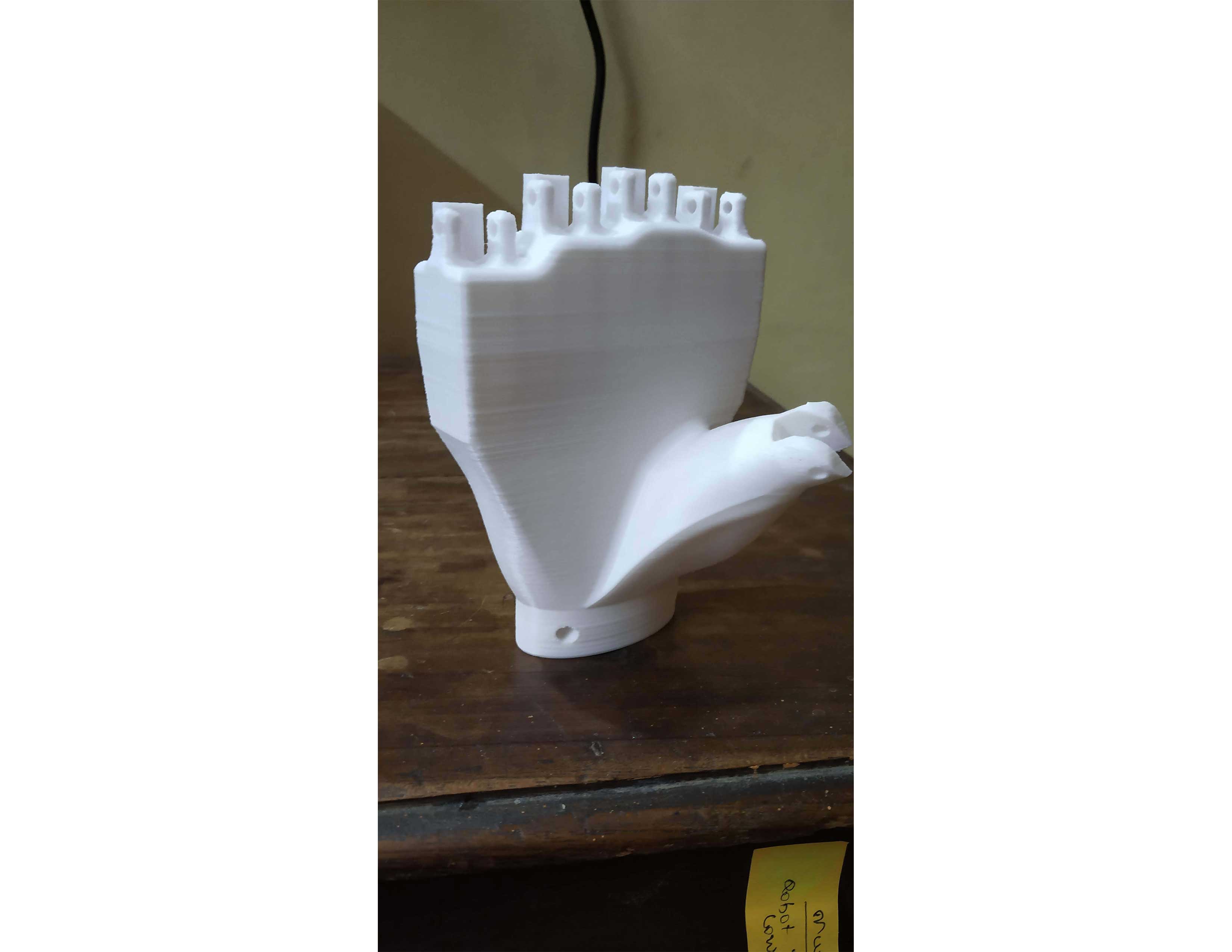
First hand Model
Note: I did some minor modifications in Palm. After some test prints of the palm, I realize I need some stopper in the palm joint which will stop the finger to go another way... although it will be not visible in the current render in 3d prints section it will be there.



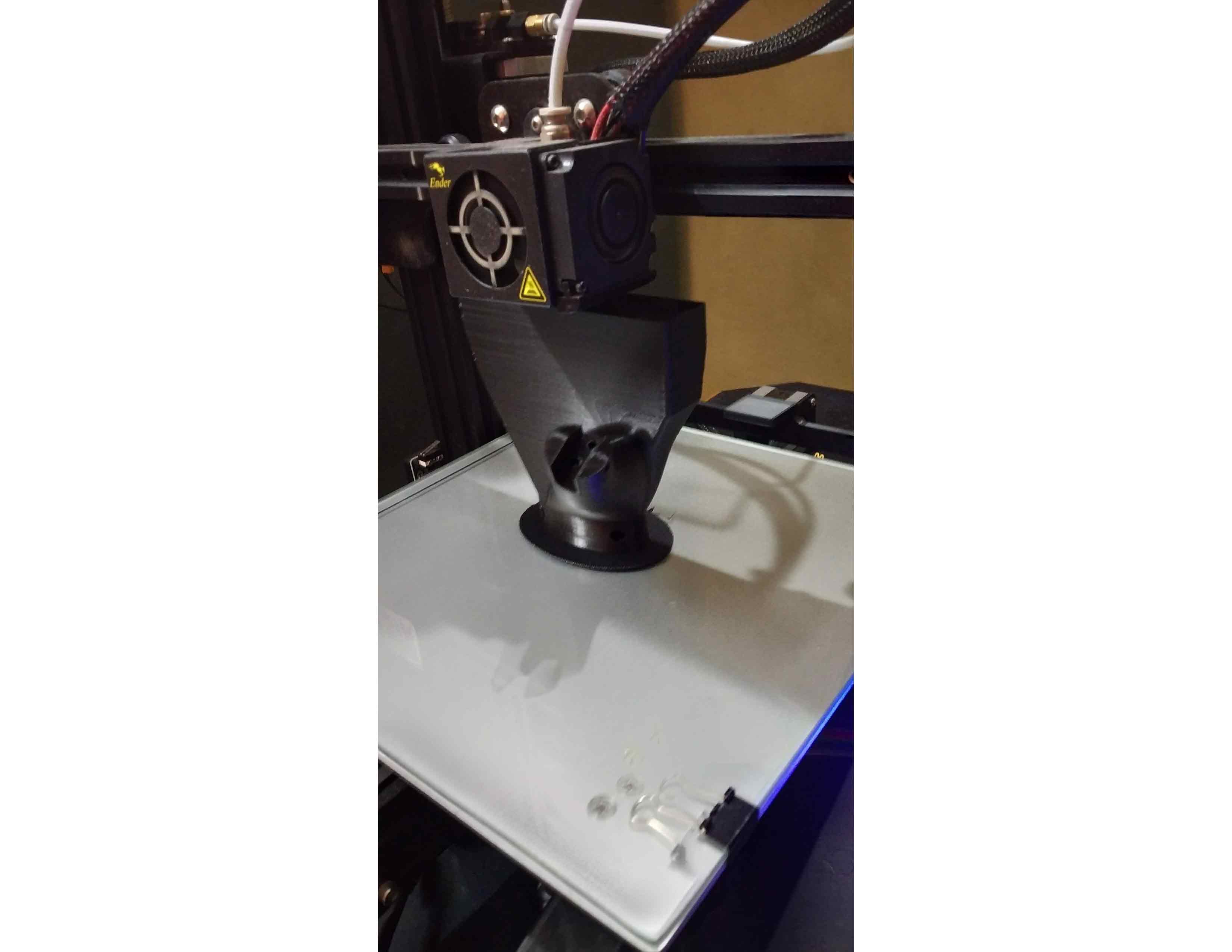
3D Printing
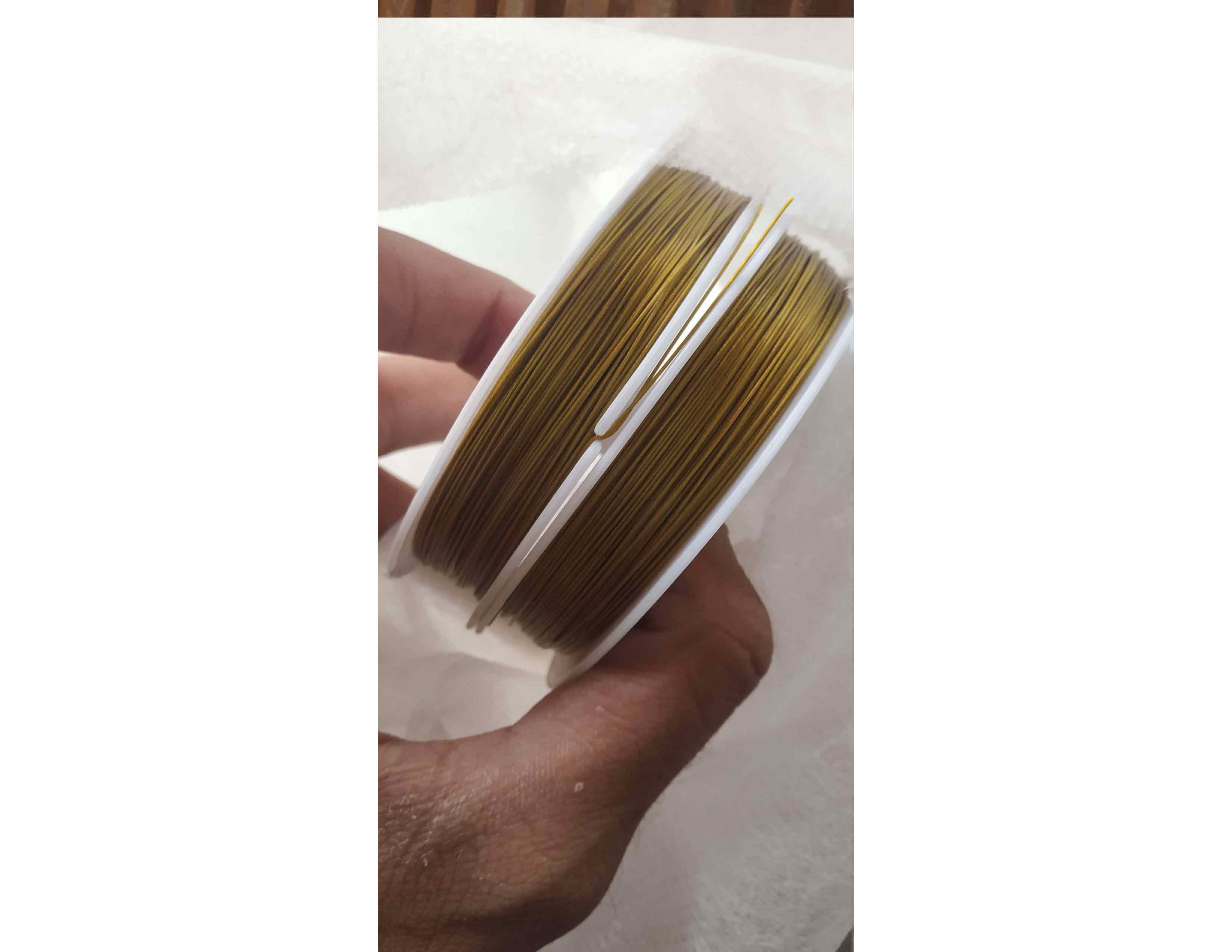
Copper string and elastic String

inserting string


first finger assembly
I did print only one finger to know if any modification was needed, and yes there are many changes required.

changes I need to make
- I need to make angular stoppers for the fingers so they can stop rotating at some angle, this will help me to grab objects.
- RIGHT NOW I CAN'T FIT MORE THAN ONE FINGER, BECAUSE OF SPACING OF JOINTS IN PALM. I HAVE TO INCREASE THE SPACING, IN DRAWBACK THIS WILL INCREASE PALM SIZE ALSO.
Updates in model
I included angular stoppers in fingers so they will stop rotation at some point and it will help to grab things easily.
Palm
Did some minor changes in grooves inside the palm, modified stoppers at the back so the finger can rotate smoothly, and did some minor changes in thumb position based on last design observations.

finger Modifications
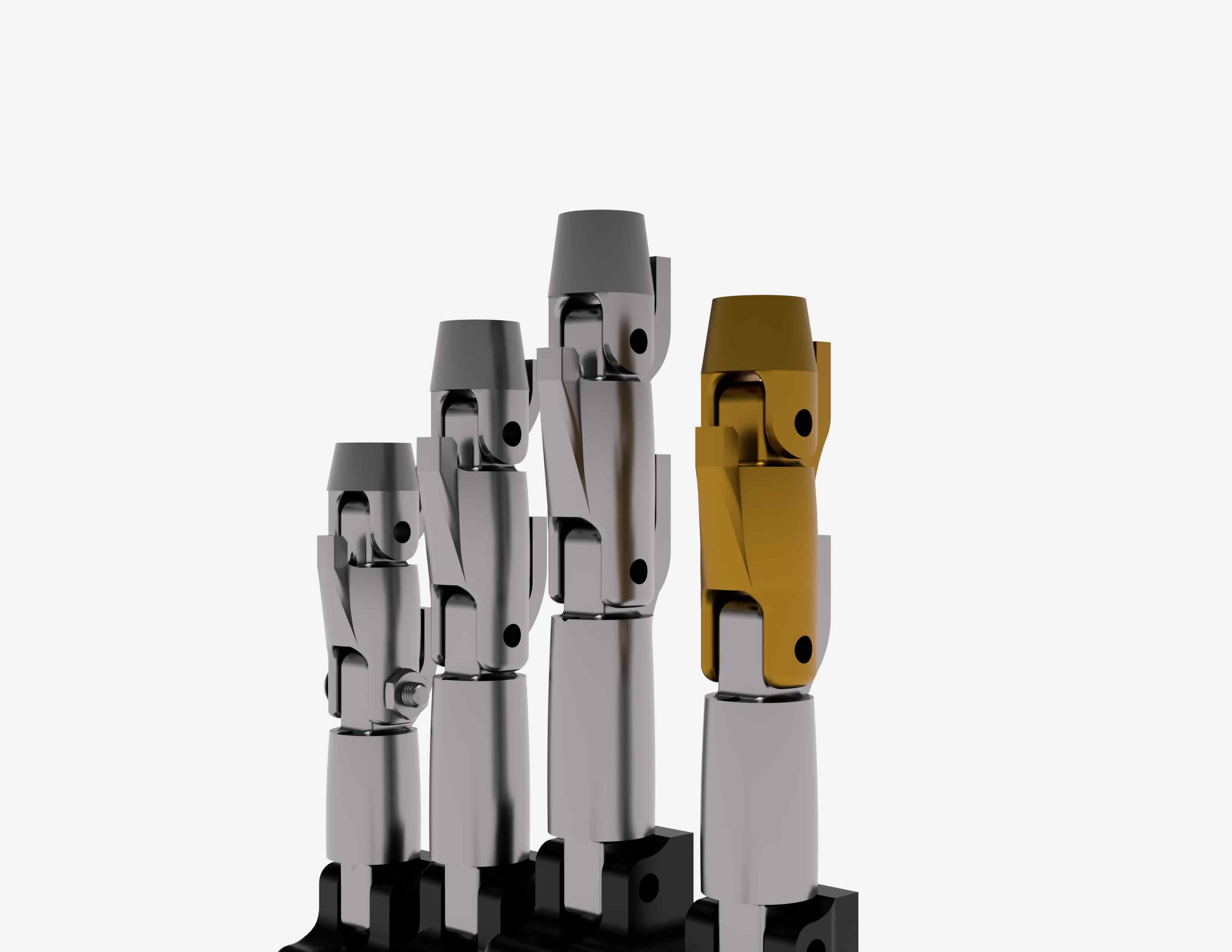
Model

3D printing

assembly
0.5 mm steel strings


First Full model prototype

It can Hold :)
I tested the hand model by trying to grab my mouse. in the below image I am pulling the elastic strings by hand! but this design has some major issues I have found during the design procedure. I have listed some drawbacks below.


Drawbacks
- The thumb position was wrong. since I have a fixed thumb position, I will not possibly hold all the objects I want to. as implementation, I will like to work on a design on which I can move thumb so I can grab any objects I want.
- one thing I noticed is my fingers rotation joints are in the wrong position, if I place rotation joints on the front section I can grab objects more easily.
- The geometry of the finger was not a suitable design for holding objects. because of the circular profile, there was only point friction between objects and finger surfaces and that's why it was slipping.
- A hand is too much bigger, the issue is I am not able to find small fasteners in local so spacing increases.
- Too many strings. design is becoming bulkier and I am thinking about a more clear and definite mechanism. I want to switch to mechanical links instead of strings.
- I am not satisfied with this design because I was not able to make one good string holding mechanism for elastic strings.
- gripping issues. objects were slipping from hand.
- more efforts are needed.
- Design is less aesthetic.
conclusion
This was our work related to the final project. I am not proud of the end-design, yet, I am proud of the learning and progress I made during this project. Now, I know a lot of things I need to take care of before jumping on direct projects
like this. making a list of design requirements and getting insight into its working, in the end, it's important. I also admit I have a lot to learn if I want to work in a field like Robotics as a designer but this project gave me a good
amount of experience, I was lacking...
"some things you learn hard way!"
Seond section
This section is part of my experiments with finger design. As I was working on my final projects I realized I should explore more on the finger mechanism alone first. if I can make one compact and definite finger motion that can replicate the human finger motion, then designing Palm will be more accurate and reliable.
String-Spring mechanism
Because one of the drawbacks was the tediousness of working with strings I thought to remove the elastic strings. Working with elastic string has more issues than just complexity, it was not giving definite motion each time because of hysteresis loss. I also wanted to remove angular constraints because it was reducing the contact area and so the gripping.
so I decided to replace it with the spring mechanism. I was gonna use torsional strings to store the rotational energy. it will help fingers to go in the initial position.
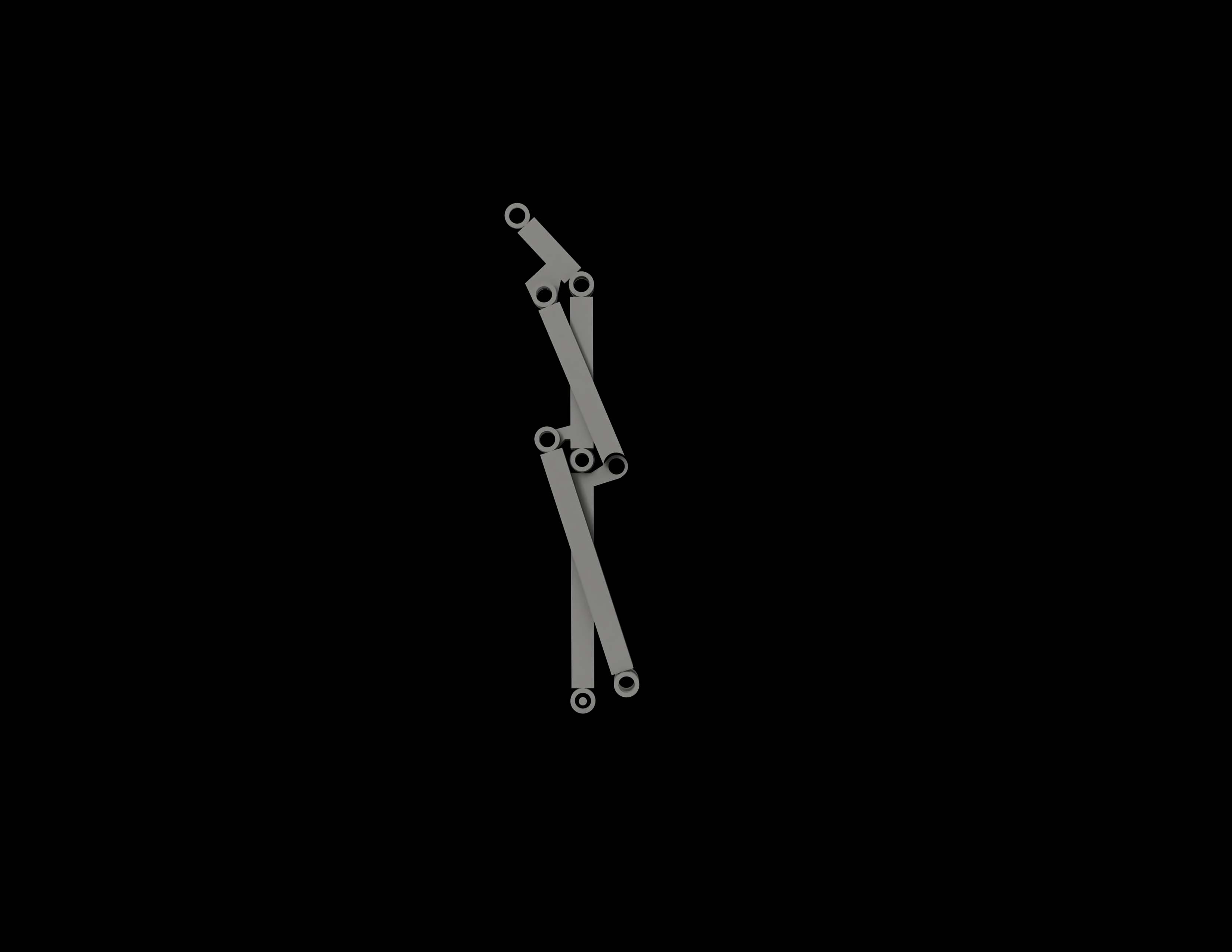
Mechanism Configuration
I first try to know which mechanical Configuration will work to replicate finger design motion. later I design to remove the top of the finger mechanism to make it more simple for design.
Finger Design

3D print and assembly



conclusion
Finger mechanism with torsional spring has much definite motion than string design and I may like to work with it more in future but for now, I would like to explore one more mechanism I have in my mind. I don't want to jump to a conclusion that this design will be perfect!
Finger Design with Gears
I did some modification in spring design and thought I can try a small gear drive below the finger mechanism which will move the fingers. I think this design will able to transfer force to fingers more conveniently and because of gears I will not nave to store and release the energy as before. the only limitation I am seeing now is somehow I have to make it compact to use in a prosthetic hand.
CAD
Did some modifications to the previous finger design. I was happy with the outcome, the finger was looking good. :)
- The tip of the finger will act as a kind of hook and it will help to grab the object.
- As stated on the first Drawbacks I made the front end of the finger flat so it will help to increase friction or I may use some good friction Material there.


Full Design



prototyping
Mechanism


Full model
The mechanism turns out to be good and definite as I wanter in the first place. I didn't need any extra mechanism to store the rotation energy as the previous design and I will make movements more accurate.
Watching the finger movement gave me so much happiness. One can also see the updates I made on fasteners. I used 3 mm Allen head bolts of different lengths. they will work as good pivots.


Drawbacks
- The design has major size issues. because of servo positioning and head of the fastener's design was taking too much space width-wise.
- I calculated my palm size based on this design and turns out its width will be 150mm. which is TOO MUCH.
conclusion
This was my work related to Prosthetics so far, after working on my college project till February 2020 I started working on these finger designs. before lockdown began in our country I managed to get some parts mainly servos and fasteners
and started experimenting on my finger designs. The last design took two months to complete, because of my inconsistency in lockdown.
After completing the design, I get to know how much more I needed to learn in this field. in the future, my focus will be to embed the pully mechanism in my fingers and try to make it more compact somehow. Right now I am studying some YouTuber's work to get some good insights.